Robot Learning from Demonstration on a Unified Representation
Caiming Xiong1, Nishant Shukla1, Pablo Garcia Kilroy2, Mun Wai Lee3, Song-Chun Zhu1
Center for Vision, Cognition, Learning and Art, UCLA1
Introduction
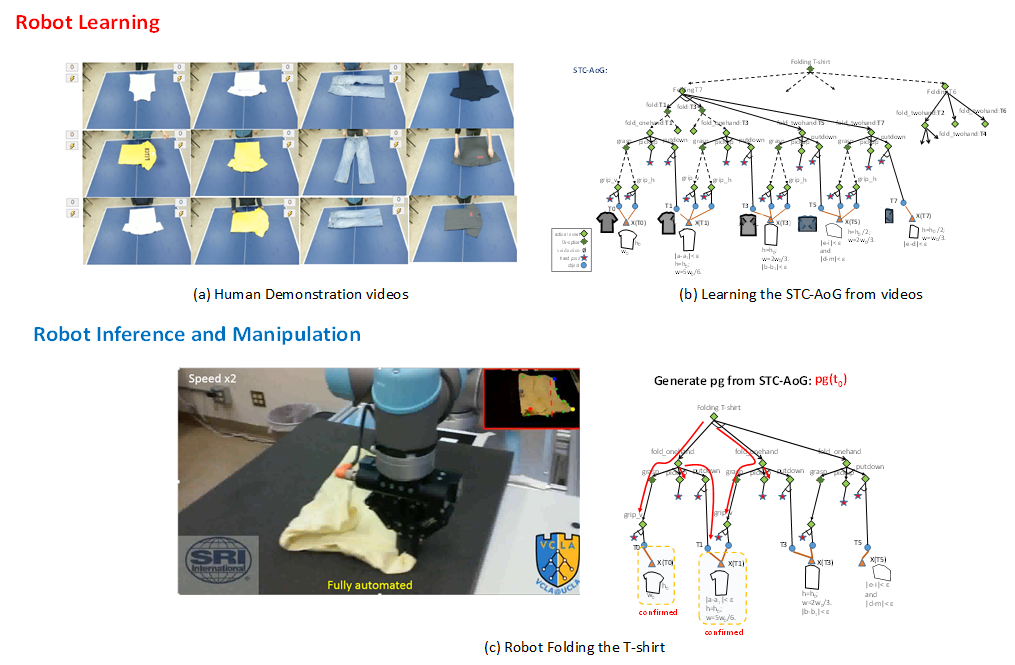
In this project, we propose a unified knowledge representation(STC-AoG) for task-oriented robot learning from multi-source such as human demonstration videos(YouTube videos), interactively written/verbal instructions etc.. In this demo page, we show some results of our STC-AoG learning and inference within two robot platforms. Robot I, provided by SRI, presents the task of folding clothes. Robot II, provided by IAI, presents the task of assembling the table.