Beyond Point Clouds: Scene Understanding by Reasoning Geometry and Physics
Bo Zheng, Yibiao Zhao, Joey C. Yu, K. Ikeuchi, and Song-Chun Zhu[Mirror Site]
Abstract
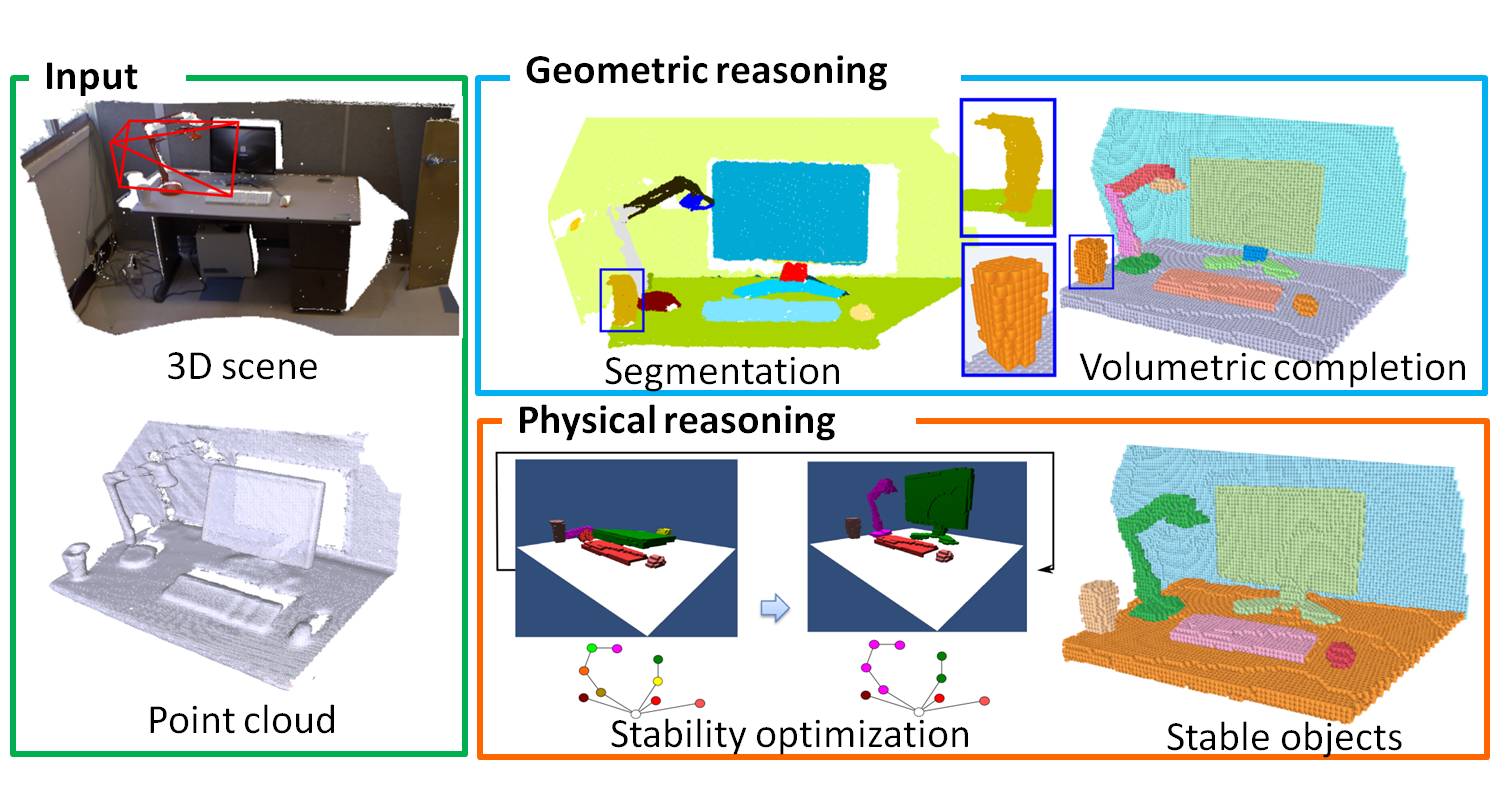
In this paper, we present an approach for scene understanding by reasoning physical stability of objects from point cloud. We utilize a simple observation that, by human design, objects in static scenes should be stable with respect to gravity. This assumption is applicable to all scene categories and poses useful constraints for the plausible interpretations (parses) in scene understanding. Our method consists of two major steps: 1) geometric reasoning: recovering solid 3D volumetric primitives from defective point cloud; and 2) physical reasoning: grouping the unstable primitives to physically stable objects by optimizing the stability and the scene prior. We propose to use a novel discon- nectivity graph (DG) to represent the energy landscape and use a Swendsen-Wang Cut (MCMC) method for optimization. In experiments, we demonstrate that the algorithm achieves substantially better performance for i) object segmentation, ii) 3D volumetric recovery of the scene, and iii) better parsing result for scene understanding in comparison to state-of-the-art methods in both public dataset and our own new dataset.
Publication
B. Zheng, Y. Zhao, Joey C. Yu, K. Ikeuchi, and S.-C. Zhu, "Beyond Point Clouds: Scene Understanding by Reasoning Geometry and Physics" , Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2013.
B. Zheng, Y. Zhao, Joey C. Yu, K. Ikeuchi, and S.-C. Zhu, "Beyond Point Clouds: Scene Understanding by Reasoning Geometry and Physics", SUNw: Scene Understanding Workshop jointed with CVPR 2013.
Demo